Block Diagram
Block diagram
컨트롤 이론을 보기 쉽게 다이어그램으로 나타낸건데
컨트롤에 들어가기 앞서 알아두면 좋은 개념임
왠만한 컨트롤 관련 논문보면 이게 거의 필수로 들어가있는걸 알수있음

지금까지 주로 예시로 들었던 기본식의 S domain인데
이걸 모델 혹은 있어보이려면 plant라고 부름

기본적으로 블록 다이어그램은 이렇게 이루어져 있음
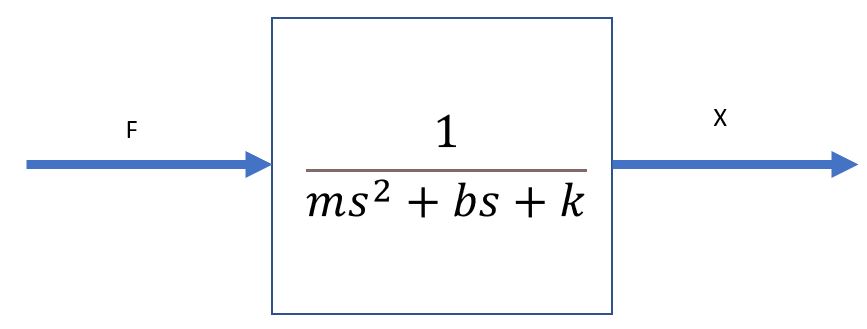
그리고 위의 기본식을 다이어그램으로 나타내면 이렇게 나오는데
input은 F, output은 x를 나타냄

컨트롤 블록 다이어그램 역시 모델 다이어그램하고 비교해봐도
똑같이 input과 output, 모델로 이루어져있음

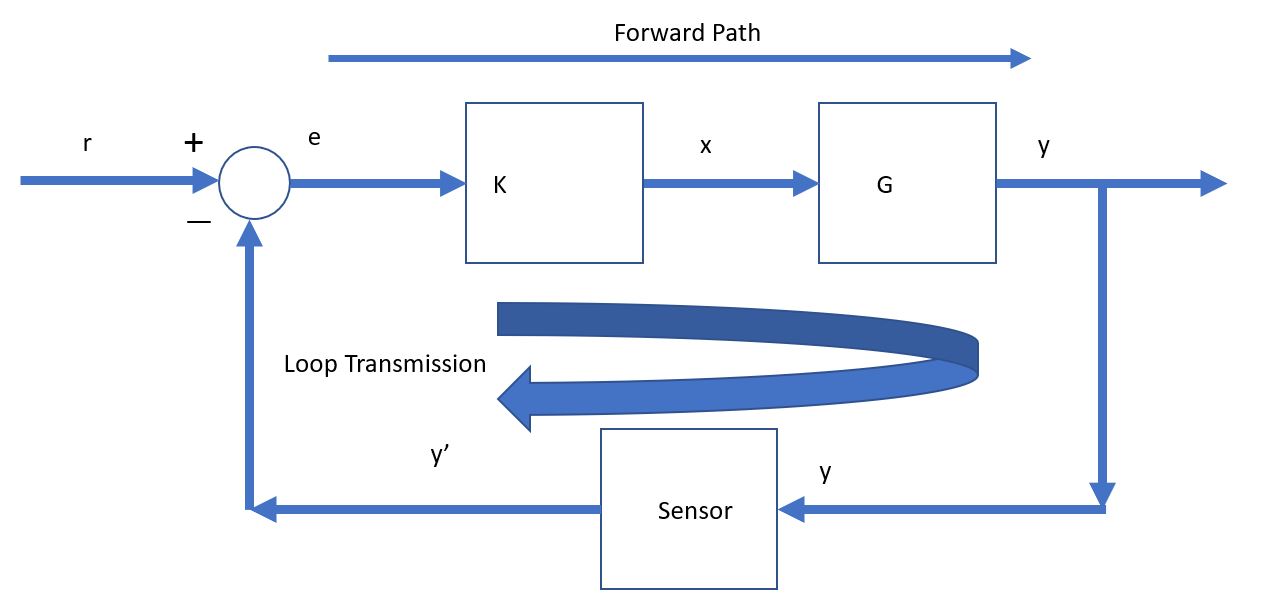
나중에 또 적을 컨트롤러랑 센서랑 넣으면 기본적인 블록 다이어그램이 이렇게 완성됨
이거는 feedback loop라고 부름
이거 말고도 feedforward랑 pre-reference라는 컨트롤 루프가 있는데
피드백 루프가 제일 유명하고 자주 쓰이니까 이것만 쓸 예정

센서는 나중에 추가해도 될정도로 복잡한거는 아니라서 지금은 빼도 됨
있어도 샘플링 속도가 빠르면 거의 모델링이 필요없어도 무방할 정도라서
생각보다 중요하지는 않음
하지만 정확도를 위해서는 넣는게 좋긴함

이거는 위 피드백 루프를 주로 쓰는 변수로 바꾼것 뿐인데
이 피드백 루프에서 또 다른 transfer function을 구할수가 있음
error는 reference랑 측정된 값의 차이
reference는 우리가 원하는 수치를 나타냄
결국 에러는 원하는 값 - 실제로 측정된 값을 뜻함

나중에 다룰거지만
컨트롤러의 transfer function은

이렇게 에러와 plant의 input으로 이루어져있음
위에서 구한
이 식을
여기에 대입하면

이렇게 나옴
그 다음에 계속 써왔던 기본식의 transfer function을
output만 냅두고 한 쪽으로 몰아주면

이렇게 나오는데
마찬가지로 위에 구했던 x를 여기에 대입하면

이렇게 나온다
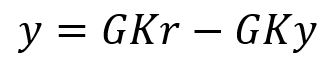
그 다음에 이렇게 풀어서 쓴 뒤에

y를 한쪽으로 몰아주고

y로 묶은 다음에

y에 대해서 구하고

input인 r을 반대로 보내면
input과 output을 가진 transfer function의 꼴이 나오는데
이거를 closed loop transfer function이라고 부르는데
이게 뭐냐하면
이 피드백 루프를

이렇게 블록 하나로 퉁칠수가 있음
참고로 이걸 야매로 쉽게 구하는 법이 있는데
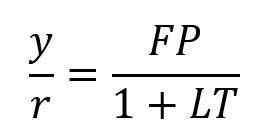
바로 이 식임
FP는 forward path
LT는 loop transmission인데
이게 뭐냐면

이거임
구하는 방식은 방향대로 블록끼리 단순히 곱하면 됨
만약에 센서가 있다고 가정하면
closed loop transfer function은
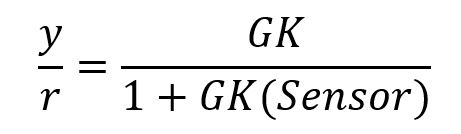
이렇게 됨
참고로 이건
루프안에 루프가 있는 nested loop에서도 똑같이 적용하여
루프 하나로 만들수도 있음